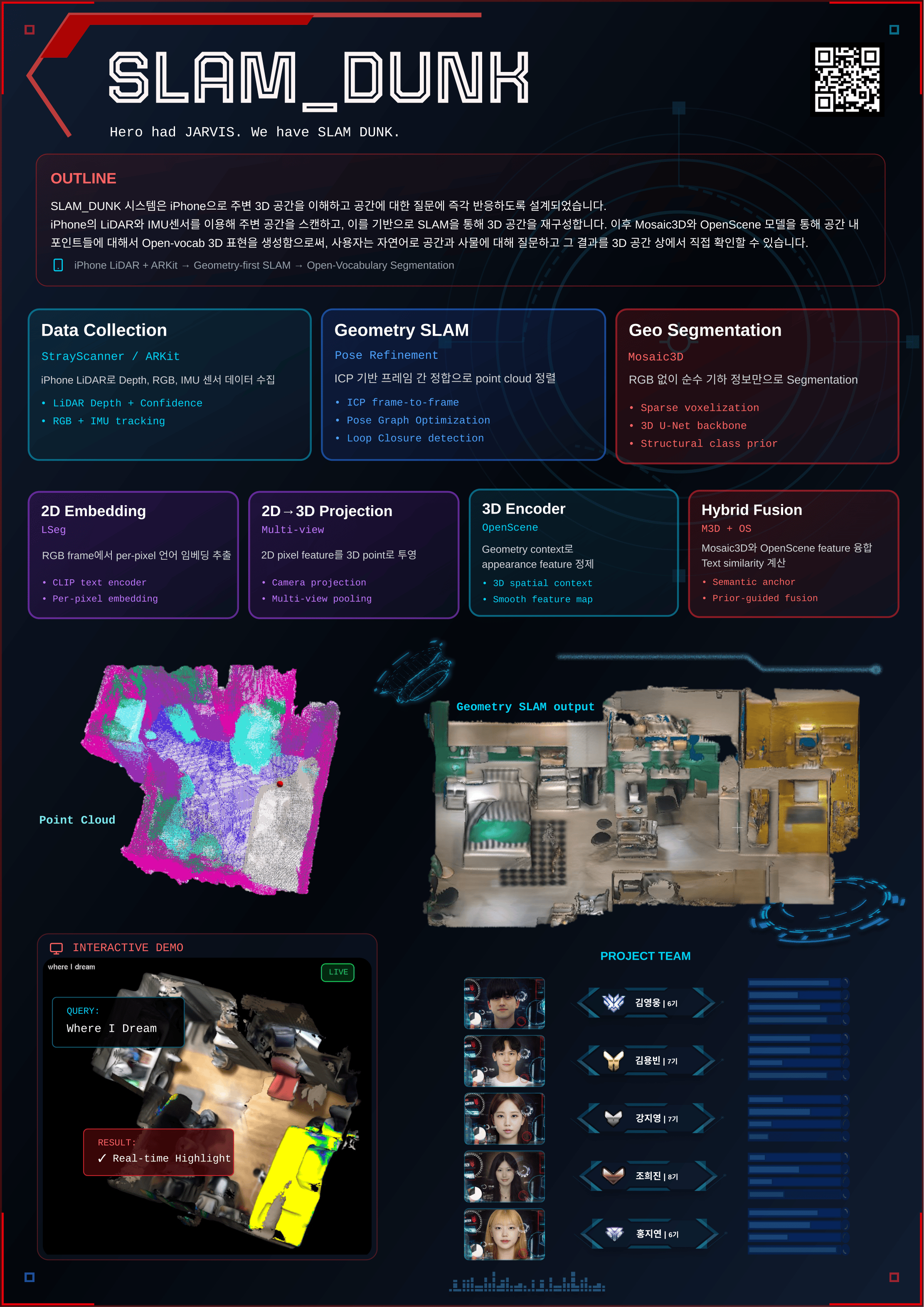
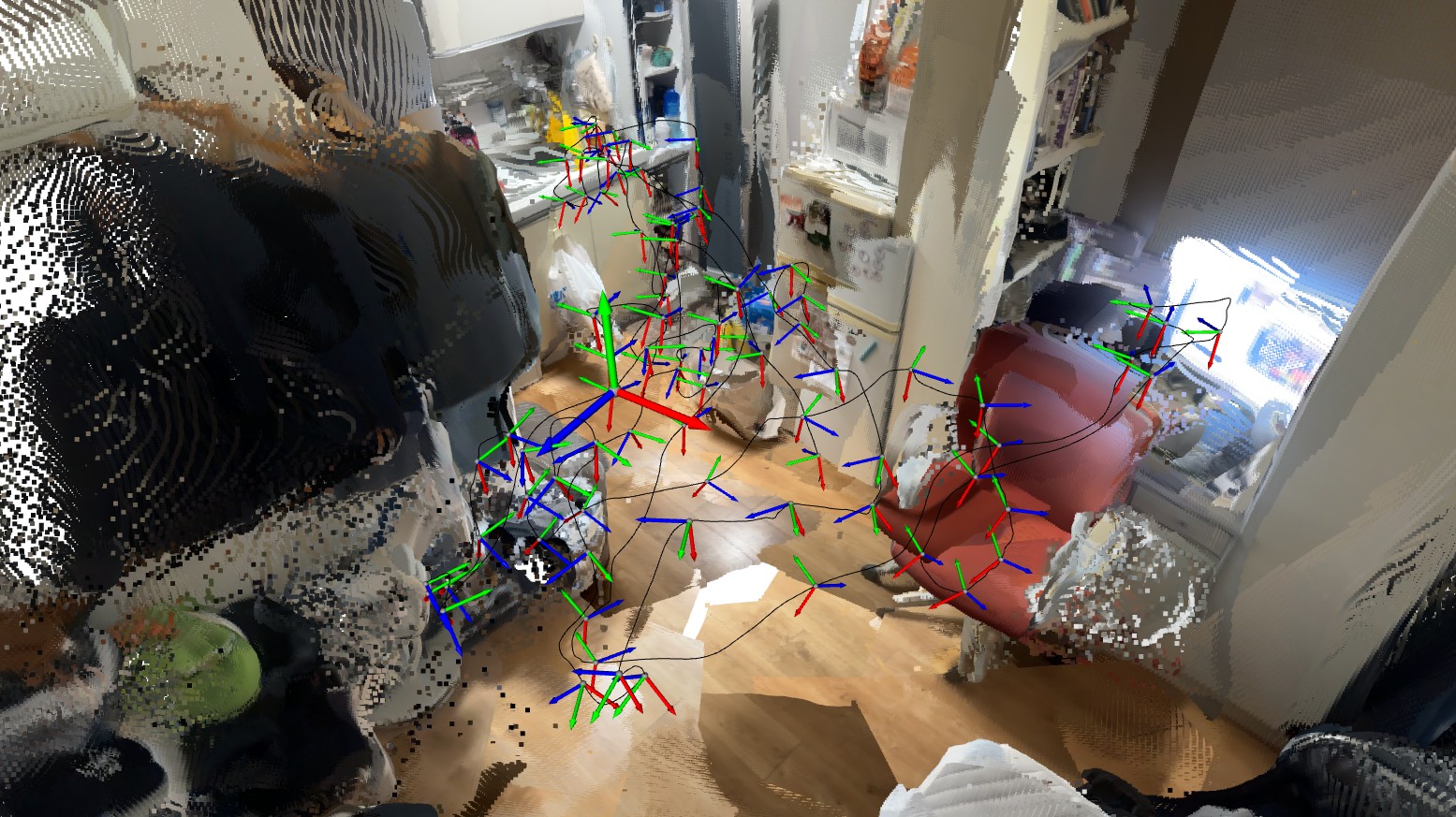
SLAM이란?
SLAM(Simultaneous Localization And Mapping)은 로봇이나 자율주행 차량이 미지의 환경에서
동시에 자신의 위치를 파악하고 주변 환경의 지도를 작성하는 기술입니다. 본 프로젝트에서는
LiDAR(Light Detection And Ranging) 센서와 IMU(Inertial Measurement Unit)를 융합하여
3차원 공간에서의 정밀한 위치 추정과 맵 구축을 수행합니다.
LiDAR-IMU 센서 융합
LiDAR는 레이저를 사용하여 주변 환경까지의 거리를 측정하는 센서로, 정밀한 3D 포인트 클라우드
데이터를 제공합니다. IMU는 가속도계와 자이로스코프를 포함하여 로봇의 움직임과 방향을 측정합니다.
이 두 센서를 융합함으로써 각 센서의 장점을 살리고 단점을 보완하여 더 정확하고 안정적인
위치 추정이 가능합니다.
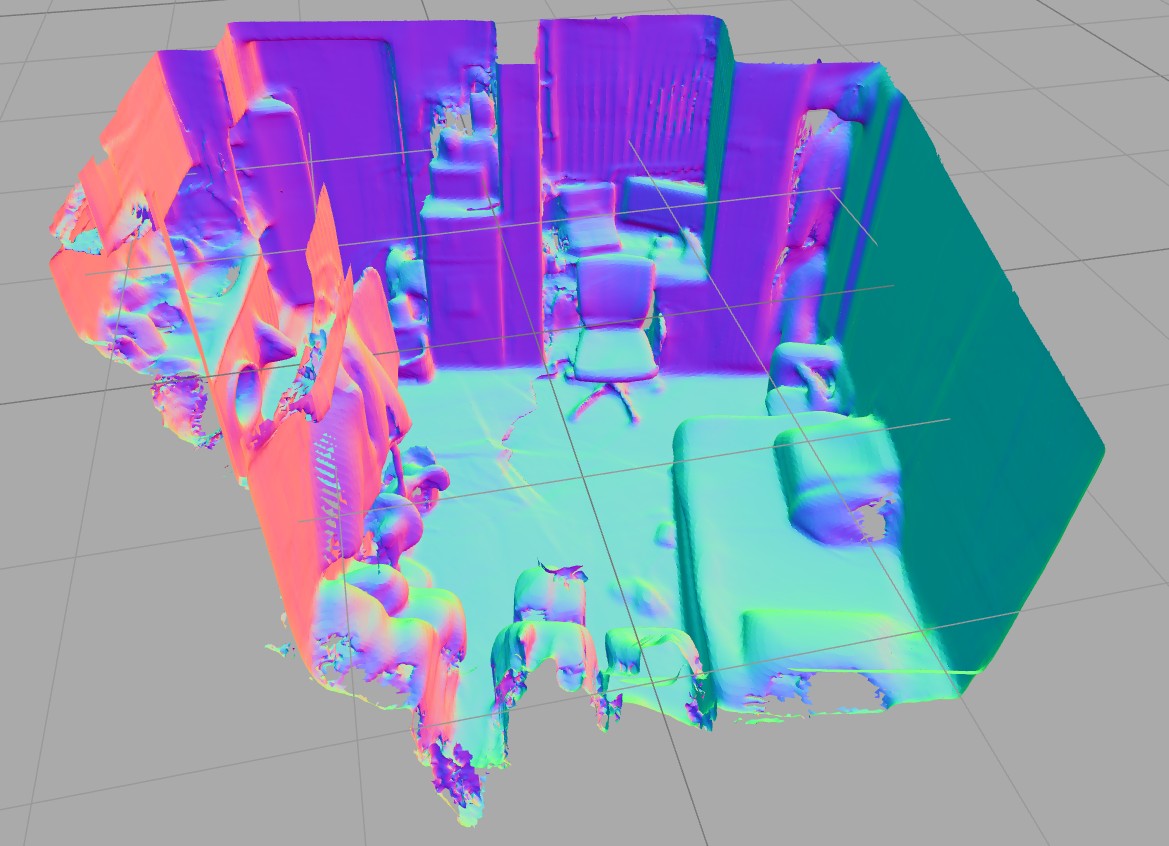
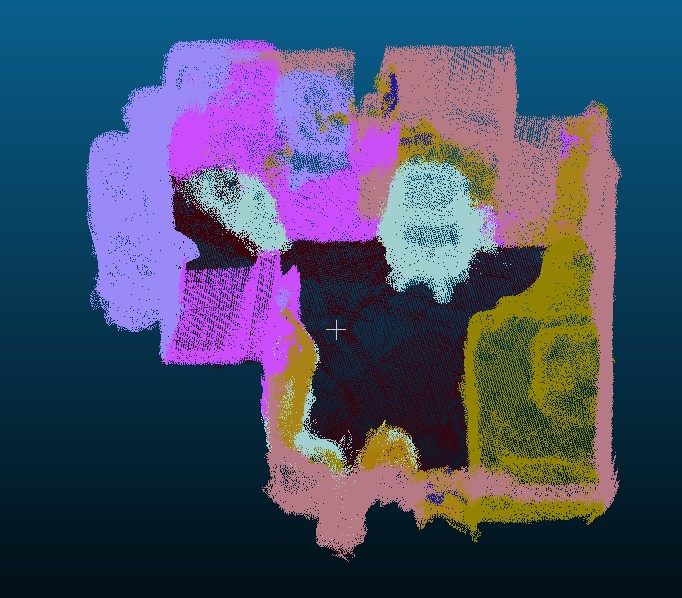
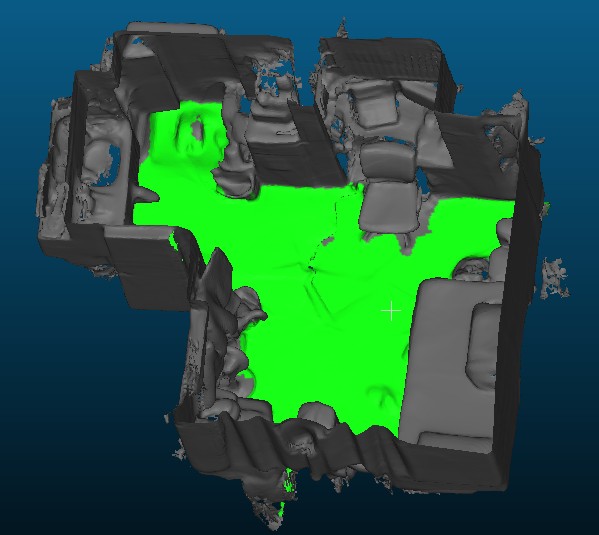
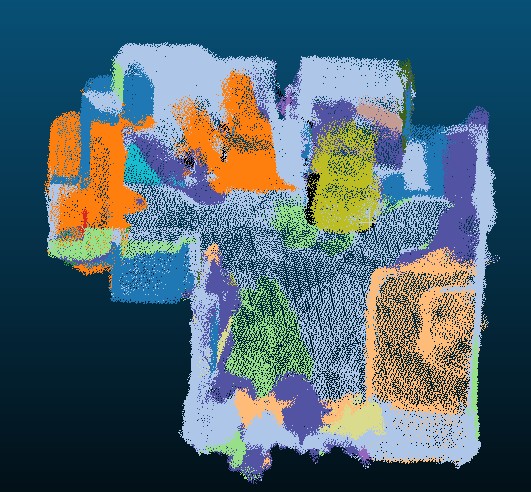
3D 의미론적 세그멘테이션
3D 의미론적 세그멘테이션은 3차원 포인트 클라우드의 각 점에 의미론적 레이블(예: 벽, 바닥, 가구,
사람 등)을 할당하는 작업입니다. 본 프로젝트는 Mosaic3D와 OpenScene 같은 최신 딥러닝 모델을
활용하여 실시간으로 3D 장면을 이해하고 분류합니다. 이를 통해 로봇은 단순히 장애물의 위치뿐만
아니라 그것이 무엇인지까지 이해할 수 있습니다.
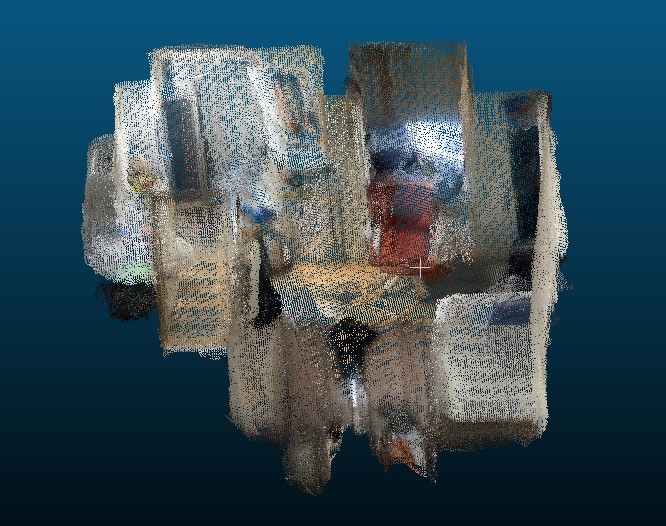
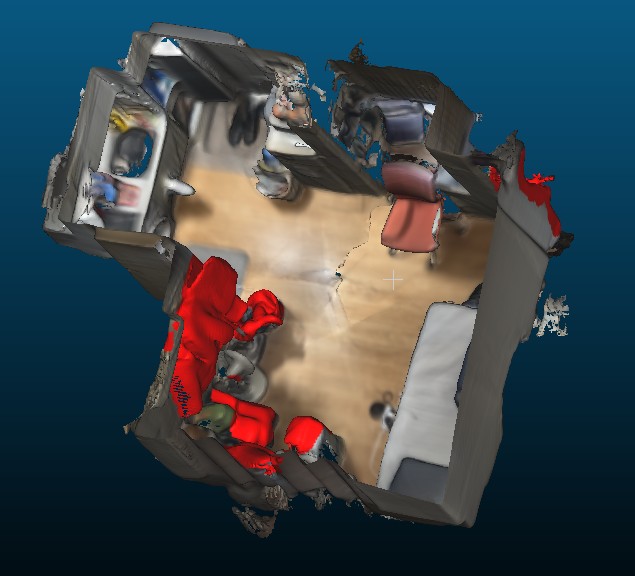
StrayScanner 데이터셋
StrayScanner는 모바일 기기를 사용하여 수집한 실내 환경 데이터셋입니다. RGB 영상, depth 맵,
IMU 데이터, odometry 정보를 포함하며, 본 프로젝트는 이 데이터셋을 활용하여 실시간 SLAM 및
세그멘테이션 알고리즘을 개발하고 검증합니다.